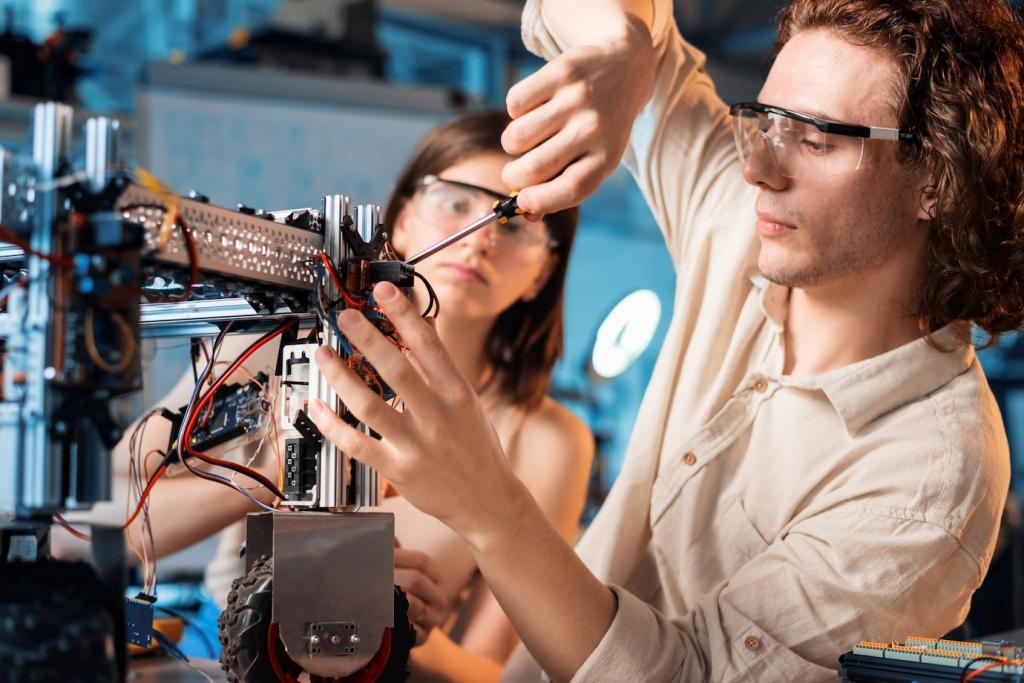


Sensoren: Die Sinne des Roboters
Ultraschall und Time‑of‑Flight messen Entfernungen, während IMUs aus Gyro und Beschleunigung die Lage schätzen. Kombiniert mit Magnetometer entsteht eine robuste Orientierung. Probiere Sensorfusion aus und berichte, welche Filtereinstellungen bei dir am stabilsten laufen.
Sensoren: Die Sinne des Roboters
Taktile Sensoren, Dehnungsmessstreifen und Stromsensoren verraten, ob ein Greifer zu fest zupackt oder ein Rad blockiert. Dieses Feedback schützt Mechanik und Werkstücke. Welche Grenzwerte nutzt du, um Schäden zu verhindern? Teile deine Schwellen!
Sensoren: Die Sinne des Roboters
Drehe die IMU langsam in alle Achsen, logge Rohdaten und kompensiere Bias sowie Skalenfaktoren. Erst danach stimmen Richtung und Drift. Unsere IMU wurde so von launisch zu verlässlich. Brauchst du ein Log‑Template? Schreib uns!
Sensoren: Die Sinne des Roboters
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.